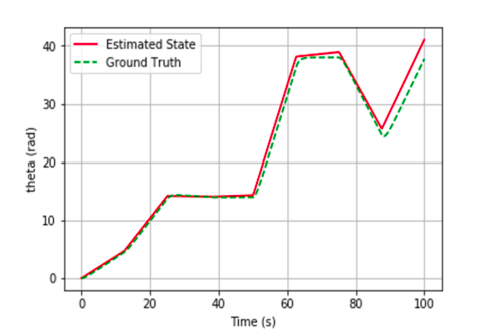
Linear Time Invariant State Space System Identification Using Adam Optimization
In this paper, LTI systems are modelled in state space representation with a TensorFlow graph which is optimised with Adam to learn system parameters.
I'm Mark and this is my portfolio.
Hope you like it! :)

Machine Learning and Robotics Engineer
Click on any project name or image for more details.
In this paper, LTI systems are modelled in state space representation with a TensorFlow graph which is optimised with Adam to learn system parameters.
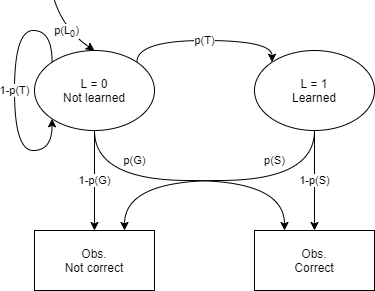
This was a collaboration research project between Discovery Education and Uniparticle.
Bayesian Knowledge Tracing, a Hidden Markov model, is utilised to analyse the results of assessments.
The technique was tested and validated with a real-life dataset from a coding competition.
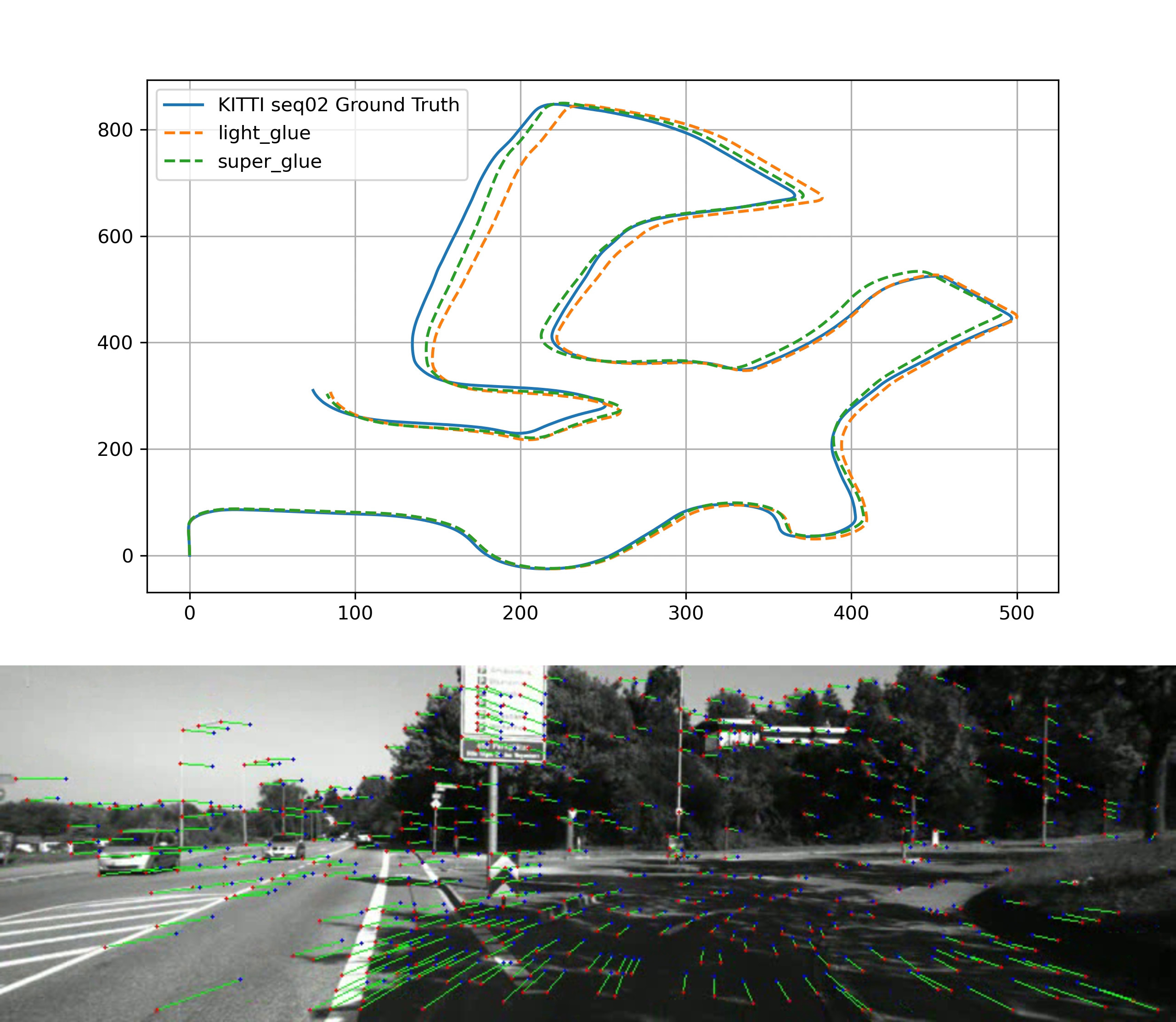
A full Visual SLAM pipeline using state-of-the-art deep learning-based feature descriptors and matchers (SuperPoint, DISK, SuperGlue, LightGlue) and deep stereo depth estimation.
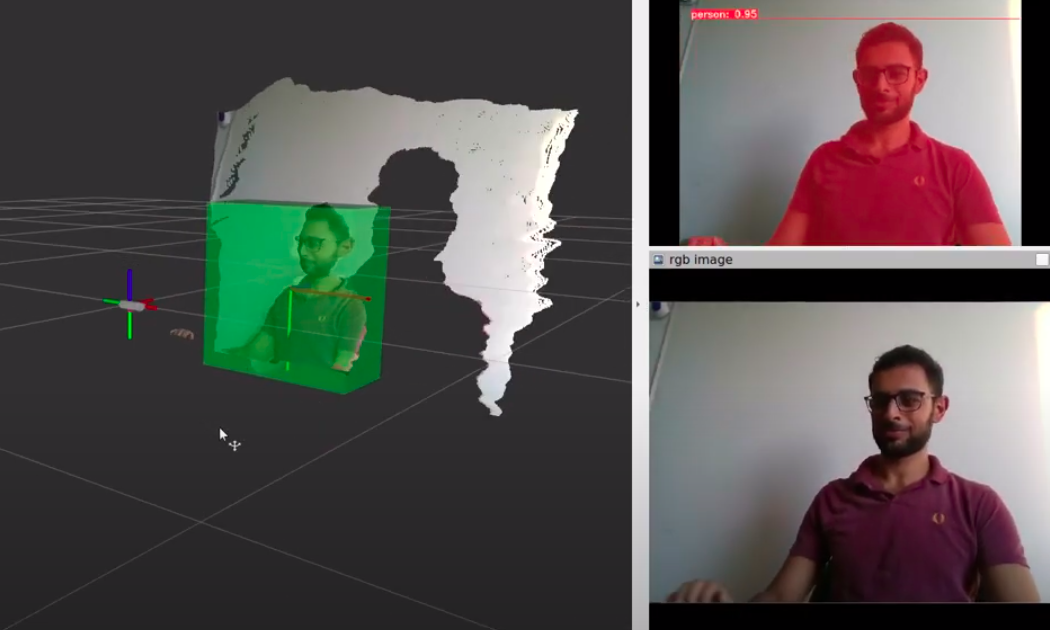
A ROS wrapper for yolact instance segmentation with depth image extension for 3D bounding boxes and pointcloud segmentation. The package has different pointcloud filtering techniques (K-means & Gaussian filtering).

A robust deep learning-based Know Your Custmer (KYC) for Egyptian national IDs. (face detection, face matching, Arabic OCR, ID validation)
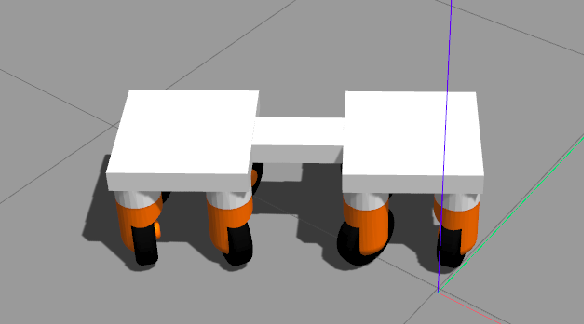
A real-time safe N-wheel non-holonomic omnidirectional vehicle controller. This controller is now a part of the ROS controllers package.
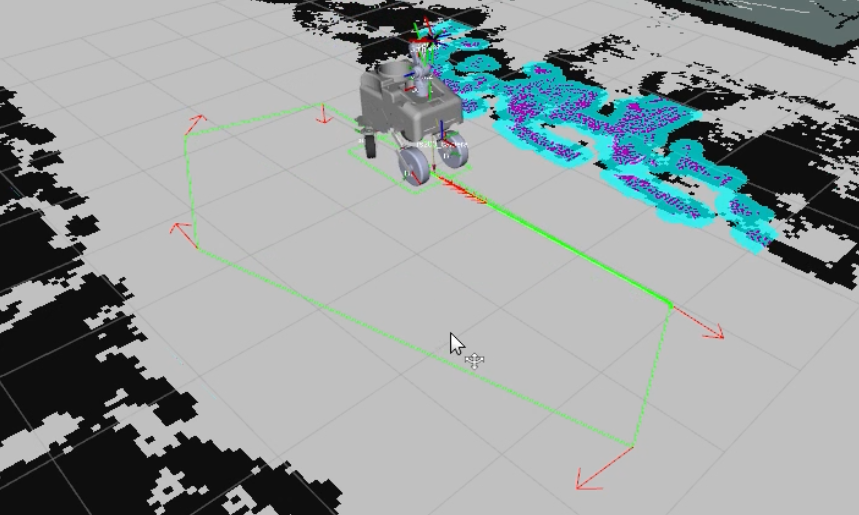
A ROS Action server to handle communication with move base action server to navigate through a list of waypoints. The package is available on ROS (Kinetic/Melodic/Noetic) for installation.
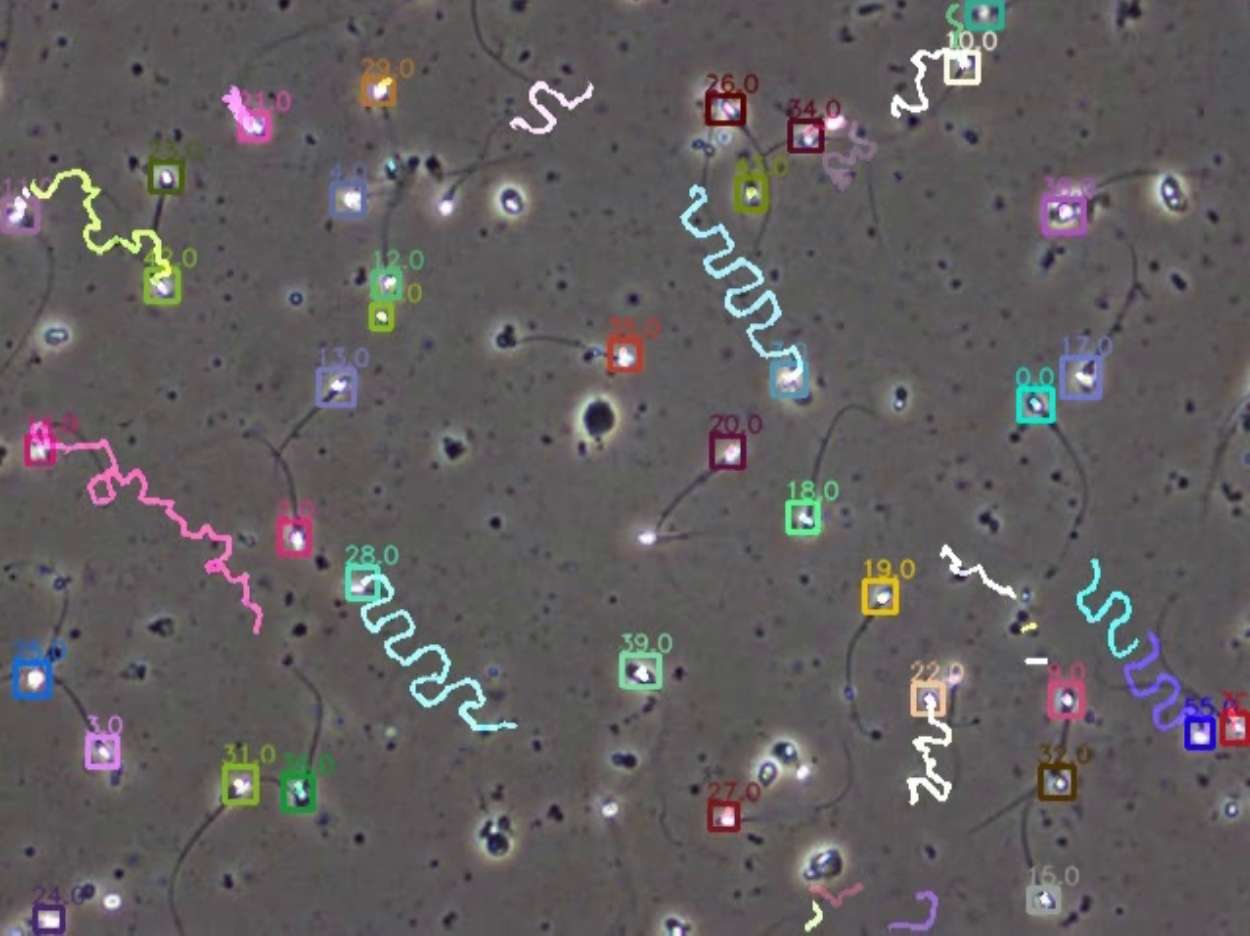
Faster R-CNN object detection and a modified DeepSORT were used to detect and track human spermatozoa in phase-contrast, dark-field, and bright-field microscopy imaging. The recorded tracks are then used to calculate and report various parameters.
I can only share the given details about this project.
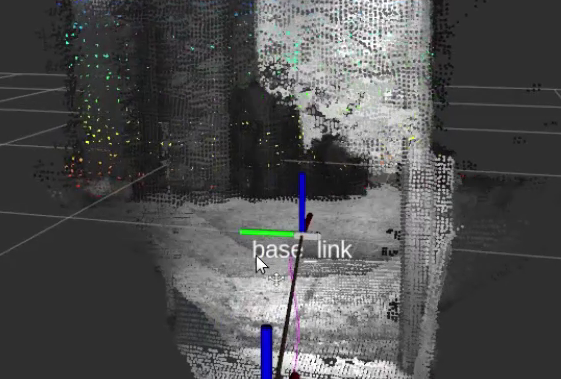
D435i camera is solely used to obtain reliable visual-inertial odometry and SLAM.

Off-road agricultural mobile manipulator controlled by ROS for real-time fruit detection and picking tasks.
A project made at the robotics lab of University of Central Lanchasire (UCLan). Funded by a grant from Erasmums+.
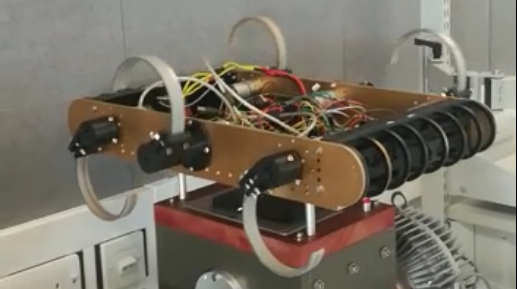
The project aimed to enhance and modify an old Catalyst robot at mechatronics lab, Ain Shams University.

A recurrent neural network (RNN) to classify a raw unfiltered dataset of hand gestures recorded using the Myo arm band.
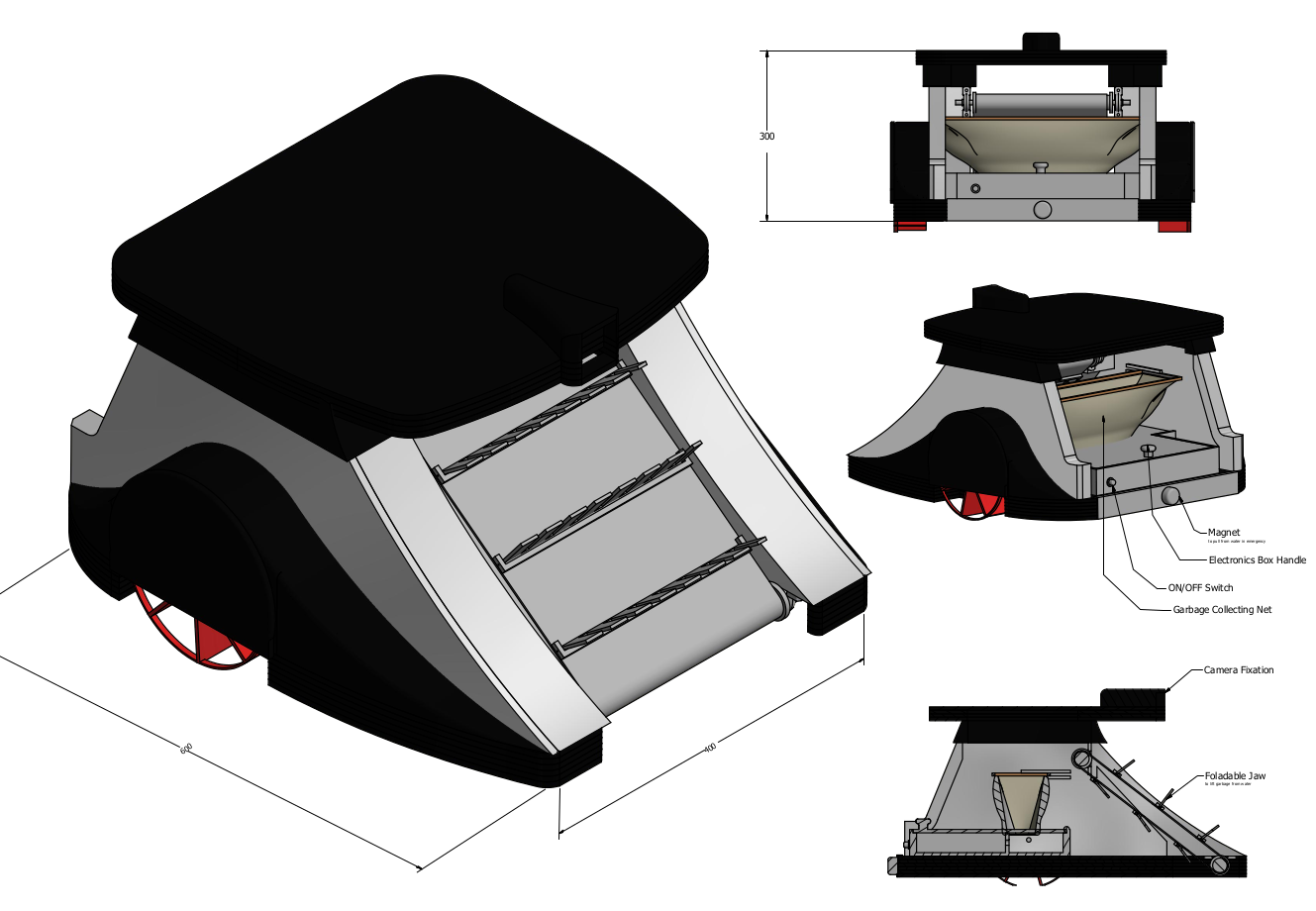
The project targeted plastic waste in rivers using an autonomous boat for picking the plastic waste from the water.
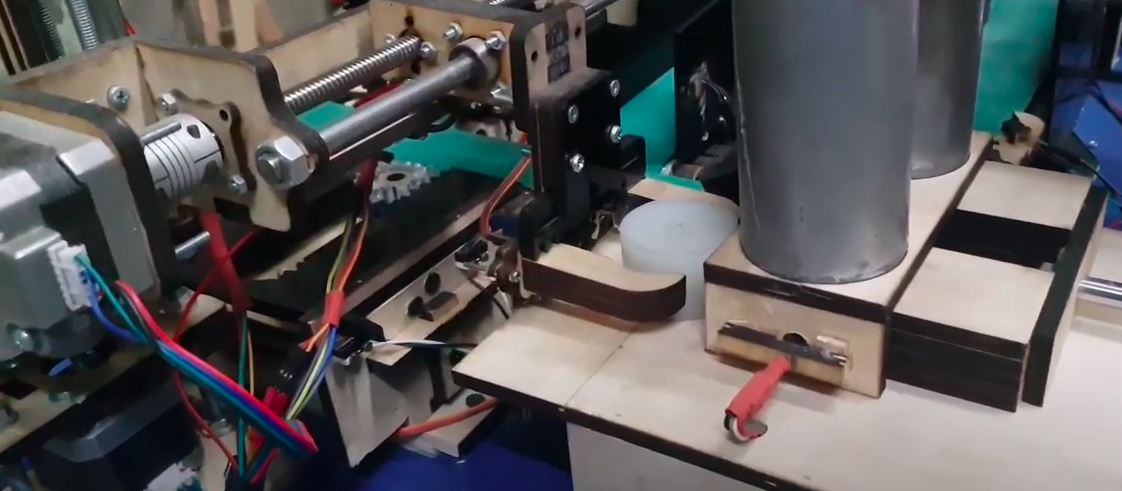
Undergradaute course project. A fully automated assembly/disassembly low-cost production line. Won the 1st place.
If you have any question, project to work on, or anything to discuss, do not hesitate to contact me on my email or LinkedIn. Click on the email to get the email address copied to your clipboard (click on the envelope in the side panel to get redirected to send an email) or on LinkedIn to get redirected to my LinkedIn account. Thank you in advance.